1
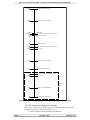
MOUNT CONTROL SYSTEM - CONTROL SYSTEM DESIGN DESCRIPTION L= bTR T 100 = 304950 500 103 100 L = 61 % This is within limits for CANbus, which can theoretically operate at close to 100% bus load. If polling for each message is added, the bus load rises to: L = 105 % This clearly exceeds bus capacity, and therefore it is not possible to run six nodes on a 500kbit/sec. bus at a constant 25Hz message rate. Five nodes could be run at this rate however. 3.7.3.5. Enclosure & Connections 3.7.3.5.1. Housing Each node will be housed in an ABS box of a similar type to that used by the Axial Support nodes. It will have a conductive coating applied internally to reduce EMI. 3.7.3.5.2. Physical Connections The following physical connections are made to the node. • CANbus (screened, twisted pair) • 120VAC single-phase mains power • 12V external DC in (if required) • Sensor and transducer connections (via two 37-way D-type connectors) The sensors and transducers are not connected directly to the node box itself, but are routed via a breakout box as shown in Figure 3.39. This enables a node box to be easily removed without having to break a large number of connections. Monitoring & Metrology Node box 2 x 37-way D-type connectors Connector breakout box Figure 3.39 - Connecting sensors via a breakout box PAGE 68 of 79 14 January 1997 ISSUE : 3