1
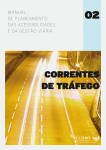
(a) 2010 Prometheus (b) 2011 Prometheus Figure 1.5: Progression of Prometheus from the 2010 IGVC to the 2011 IGVC is the Arduino which replaced the compact reconfigurable IO (cRIO) module. There are Jaguars (motor controllers) and encoders in the rear and per requirement of the competition an emergency stop (E-stop) sits high on the robot for easy access should the robot perform in an undesirable and unpredicted way. There were several aspects of Prometheus that the 2012 team decided to leave unchanged. Most sensors on Prometheus are very expensive, including the LIDAR, GPS, cameras, and compass, and since the 2011 team didnt have any issues with any of these, our team saw no need to change the existing sensors. Prometheus’s sensors were also adequate for accurately detecting obstacles, lines, and position, so there wasn’t much need for any additional sensors, although a dedicated line detection camera was added. The computer hardware already on Prometheus consisted of an Intel i7 processor, 6 GB of DDR3 ram, a Tesla GPU, and a solid state hard drive. This was more than adequate for the computing Prometheus would be doing, so no changes were made to the primary computing hardware. 1.5.1 Systems in Identified for Improvement Prometheus 2011 had a system which successful integrated most sensors and motors on the robot. These include the two rear motors, front steered motor, SICK Laser Imaging Detection And Ranging sensor for obstacle detection, Trimble Differential Global Positioning System for absolute world position, Fly II cameras, PNI Compass and the front optical encoder for front wheel positioning. The system was lacking input from the rear optical encoders, which are imperative for accurate odometry. The 2011 architecture is laid out in Figure 1.7. The figure shows that the jaguars and compass, both of which can interface directly over serial, are first passing through the cRIO. There is also a router on board to handle communication between the cRIO and on board computer. The figure shows that the laptop is required to do any programming on the cRIO. 7