1
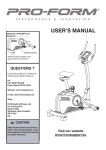
Universal Mechanism 5.0 35 Getting Started 3. Change Type of the joint to 6 degree of freedom joint. 4. Switch off 3 degrees of freedoms as shown at the left figure. Now, Pendulum1, Pendulum2 and Pendulum3 can fulfill planar motion in oscillation plane. Joints cutting settings Adding of the subsystems and description of joints between them will result in creation of several closed kinematics loops in model kinematics graph. In other words the number of model joint coordinates will be grater then the number of degrees of freedom of the multi-body system. To remove closed kinematics loops we should cut a few joints. The number of joints to cut equals that of independent cycles in the graph. As soon as the automatic choice of such joints is ambiguous and can result in non-optimal model performance, the user has an ability to select by himself. Coordinates of the rotational joints between the bodies are the most suitable for the description of the multi-level pendulum model. Therefore, we should select Weight value for the joints connecting the first body of each of the subsystems with the Base0 in a special way to “explain” program that we want to cut them.