1
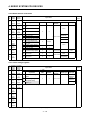
6. DRIVE MODULE *1 (a) Stop command (M1400+20n) 1) The stop command is used to stop operation at an axis where motion is in progress, and it becomes effective at the leading edge (OFF→ON) of the signal. (Operation cannot be started at axes where the stop command is ON.) ON Stop command (M1400+20n) OFF Stop command at specified axis V Control when stop command is OFF Designated speed STOP t Deceleration stop processing 2) The stop command can also be used during speed control. (For details regarding speed control, see Section 7.12 of the Motion Controller (SV13/22) Programming Manual (REAL Mode). 3) STOP processing which occurs in response to the stop command is shown in Table 6.2 below. Table 6.2 Stop Processing at Stop Command ON Processing at Stop Command ON When Deceleration to Stop is in When Control is in progress Progress Deceleration to a stop occurs within Stop command is ignored, and the the deceleration time designated in the deceleration stop processing servo program or parameter block. continues. Control in Progress Position control Speed control JOG operation REMARK *1: The "n" in M1400+20n represents the numerical value corresponding to the virtual axis No. n A172SHCPU Virtual axis No. A171SHCPU 0 1 1 6 − 17 1 2 2 2 3 3 3 4 4 4 5 5 6 6 7 7 8