1
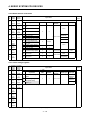
11. ERROR CODES STORED AT THE PCPU (b) When an error occurs, the error detection signal for the axis in question will switch ON, and the corresponding error code will be recorded in the minor error code, major error code, or servo error code register. Error Code Registers Virtual servo motor Synchronous encoder Output module Minor error code Major error code Minor error code Major error code Minor error code Major error code Servo error code Error Detection Signal Error Reset Flag Note When A172SHCPU D702 + 6n D1207 + 20n D1407 + 20n D703 + 6n is used n = 0 to 7 When A171SHCPU is used n = 0 to 3 D750 (n = Axis No.−1) M1360 M1560 D1607 + 20n D1807 + 20n D1608 + 20n D1808 + 20n (Reset is also valid for REAL mode errors) D751 D806 + 20n D807 + 20n D808 + 20n (c) Each time an error occurs, the previously stored error code will be replaced (deleted) by the new error code. However, a log of errors can be recorded for reference purposes at a peripheral device (IBM PC running the SW2SRX-GSV22PE software). (d) The error detection flag and error code are saved until the error reset signal or the servo error reset signal is switched ON. POINTS (1) When a servo error occurs, there are cases where the same servo error code will be stored again even after a servo error reset (M1808+20n: ON) is executed. (2) When a servo error occurs, eliminate the error cause, then execute a servo error reset. 11 − 2