1
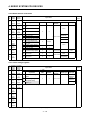
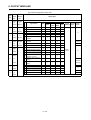
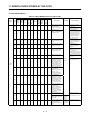
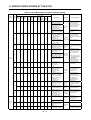
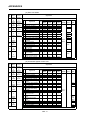
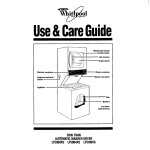
11. ERROR CODES STORED AT THE PCPU (5) Output module errors at VIRTUAL servo mode axis START (10000 to 10990) Table 11.4 Output Module Error List (10000 to 10990) (Continued) Error Class Error Code Output Drive Modu- Module le Output Module Roller Ball Screw Rotary Table Error Cause Cam • The home position return request (M1609 + 20n) is ON. 10000 1000[ ] 10010 1001[ ] 10020 1002[ ] ! ! ! ! ! ! ! ! ! ! ! Major Errors 10030 1003[ ] ! ! ! ! Processing START disabled at related systems. • The servo error detection signal (M1608 + 20n) is ON. • A servo OFF (M1615 + 20n ON) status exists at an output module where a "clutch ON" or "no clutch" setting is designated at either the main shaft or auxiliary input shaft. • An external input signal (STOP) is ON at an output module where a "clutch ON" or "no clutch" setting is designated at either the main shaft or auxiliary input shaft. Corrective Action • Return to the REAL mode and execute a home position return. • If position is not established after executing a home position return at all axes, VIRTUAL mode operation will be disabled. • Execute a servo error reset in the REAL mode. • Switch the clutch OFF, then establish the servo ON status. • Switch the stop signal (STOP) OFF. (6) "No-clutch/clutch ON/clutch status ON" output module errors (11000 to 11990) Table 11.4 Output Module Error List (11000 to 11990) (Continued) Error Class Error Code Output Drive Modu- Module le 11000 1100[ ] Output Module Roller ! Ball Screw ! Rotary Table ! Error Cause Cam ! • The servo error detection signal (M1608+20n) switched ON during operation. • 11010 1101[ ] ! ! ! ! • Major Errors 11020 1102[ ] ! ! ! ! • • 11030 1103[ ] ! ! ! ! • 11040 1104[ ] ! ! ! ! Processing Corrective Action After an • Eliminate the servo error cause immediate stop at (see section 11.4). the relevant output module, the servo will be switched OFF. • When an "operation A servo OFF status • Operation continuation" setting is (M1615+20n ON) occurred continues at designated, execute stop during operation. "no-clutch" processing at the user's MR-[ ]-B power supply was axes. sequence program. interrupted. • At axes with clutches, The stop signal (STOP) control is switched ON. executed in The upper limit LS signal accordance with (FLS) switched OFF during the operation forward (address increase mode at the direction) travel. time of the The lower limit LS signal (RLS) error. switched OFF during reverse • Operation (address decrease direction) continues. travel. • All clutches switch OFF at the relevant systems. 11 − 26