1
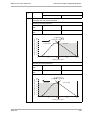
JetMove 2xx at the JetControl Compensating for Position Offset 13.8 How the Table Coupling Mode Works In default setting, the operating system immediately compensates a position offset that has occurred by the maximum speed of the following axis. The users can influence the compensation. They can specify another compensating speed. They enter the compensating speed both for leading and following axis into the following registers individually: • • R435 "Correction Velocity Leading Axis" R436 "Correction Velocity Following Axis" In default setting, the correction speed is set to maximum speed (R184). The following behavior can be achieved by the correction speed: Behavior Set Speed v No correction (i.e. relative position coupling remains) v=0 Immediate correction, i.e. there might be a jerk of the following axis v = max. speed (R184) Correction within a defined time 0 > v < max. speed Correcting a position offset explicitely results in a motion of the following axis. This means that correcting a position offset of the leading axis also results in a motion of the following axis as well as correction of a position offset of the following axis itself. This motion is linear. The operating system carries out correction overlaying an already existing table motion. If a position offset is corrected for both leading and following axis simultaneously, this results in an additional overlaid motion. A certain correction speed can cause the following axis to briefly change its direction of motion. Maintaining the Absolute Position Coupling Jetter AG The user can keep up absolute position coupling for leading and following axis by giving heed to the following aspects: • Make modulo settings for leading and following axis • Configure the tables for leading and following axis in a way that the table position range is equal to the modulo position range of the axes • The as-is set position (R130) corresponds to the set coupling position • At coupling and table change make sure there is no position offset, e.g. correction speed = max. speed (R184). 245