1
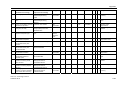
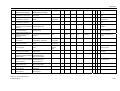
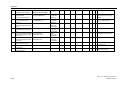
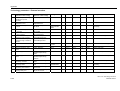
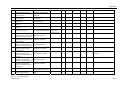
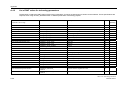
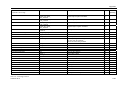
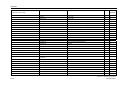
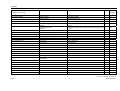
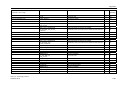
Technology functions Parameter Data type Start value Description Jerk REAL -1.0 Jerk at the transition to gearing (only when Mode = 1): Value > 0: Use the specified value Value = 0: Use trapezoidal motion profile Value < 0: Use preset value PhaseShift REAL 0.0 Phase offset after reaching synchronism With Absolute = TRUE, the phase offset effect is absolute when synchronism is reached. With Absolute = FALSE, the specified phase offset is added to the phase offset determined by the relative relationship. Absolute BOOL TRUE TRUE: absolute, relative to the axis zero position, parameter output to Jerk is ignored, the system always uses the trapezoidal motion profile (unlimited jerk.) FALSE: relative to start position Mode INT 0 Synchronization mode / coupling mode: Value = 0: Use default of the corresponding synchronization object Value = 1: Start synchronization immediately according to dynamic parameters Velocity, Jerk, Acceleration, Deceleration DoneFlag INT 0 DoneFlag generated in the MCDevice DB When gearing is reached,the DoneFlag value is inverted Output parameters Parameter Data type Start value Description InGear BOOL FALSE TRUE: Base gearing reached Busy BOOL FALSE TRUE: Command is busy CommandAborted BOOL FALSE TRUE: The command was aborted by another command or by an error during command execution. If ErrorStatus of the technology DB does not indicate an error, the command was canceled by a subsequent command. If ErrorStatus reports an error, an error at the TO occurred during command execution and has caused cancellation of the command. Error BOOL FALSE TRUE: Command initiation with error. The command is not executed; the cause is found in the ErrorID. FALSE: Command initiation without error ErrorID WORD 0 ErrorID of the Error output parameter. CPU 317T: Technology Functions A5E00251798-03 6-103