1
Vision
4-axis 6-axis device
~
{
~
{
~
{
~
V1.2
Available with all series of robots and vision device.
Available with all series of robots. The command
specifications differ between the 4-axis, 6-axis robot,
and vision device.
Available with the 4-axis robots and the 6-axis robots
of Version 1.2 or later.
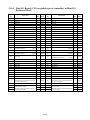
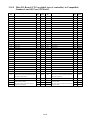
Functions
Classified by functions
Commands
DRIVEA
GOHOME
MOVE
ROTATE
ROTATEH
CURJNT
CURPOS
CURTRN
CUREXJ
DESTJNT
DESTPOS
DESTTRN
DESTEXJ
ARRIVE
4-axis 6-axis
Executes the absolute motion
of each axis.
Moves to the position (home
position) defined by the HOME
statement.
Moves to the designated
coordinate.
Executes a rotation movement
around the designated axis.
Executes rotary motion by
taking an approach vector as
an axis.
Obtains the current angle of the
robot using type J.
Obtains the current position in
the tool coordinate system
using type P.
Obtains the current position in
the tool coordinate system
using type T.
Gets the current angle of an
extended-joint into a
floating-point variable.
Obtains the current movement
instruction destination position
using type J.
The current position (instruction
value) is obtained when the
robot stops.
Obtains the current movement
instruction destination position
with type P.
When the robot stops, the
current value (instruction value)
is obtained.
Obtains the current movement
instruction destination position
with type T.
When the robot stops, the
current position (instruction
value) is obtained.
Gets the target position of an
extended-joint invoked by the
current motion command into a
floating-point variable. If the
robot is on halt, this command
will get the current position
(commanded value).
Defines the motion ratio relative
to the programmed full travel
distance to the target point in
order to make the current
program stand by to execute
the next step until the robot
reaches the defined motion
ratio.
App. 2-5
Vision
device
Refer
to:
~
~
12-11
~
~
12-13
{
{
12-14
{
{
12-19
~
~
12-22
{
{
12-24
{
{
12-25
~
~
12-26
V1.5
V1.6
12-27
{
{
12-28
{
{
12-29
~
~
12-30
V1.5
V1.6
12-31
~
V1.2
12-32